Changement du moteur TEAC EM1446 par un moteur brushed NIDEC DMN37KB - capteur moteur - disque optique -
- xaviermotti
- 21 janv. 2024
- 7 min de lecture
Dernière mise à jour : 23 févr.
Post M11. Mis en ligne le 21 janvier 2024. Mis à jour le 30 août 2025 et le 23-2-2026
Ce post est téléchargeable (voir fin).
This post as been translated and is downloadable (see at the end).
1- Position du problème.
Pour l'analyse détaillée du problème, je renvoie le lecteur au précédent post : Changement du moteur TEAC EM1446 par un moteur brushed NIDEC DMN37KB - capteur cabestan et moteur (essais) -
Dans ce post, je décris la réalisation d'un capteur de vitesse (faible coût) pour l'asservissement de vitesse du moteur choisi : Nidec DMN37KB.

2- Le moteur choisi
Dans ce post, j'utilise toujours le moteur NIDEC DMN37KB qui est satisfaisant en prix, niveau de bruit mais qui ne possède pas de capteur de vitesse. Il est proposé notamment chez RS-particuliers pour 80€ environ.
Ses caractéristiques sont les suivantes :
Tension : 24 V | Puissance : 9,2 W |
Vitesse à vide / en charge : 4300 / 3600 rpm | Courant à vide / en charge : 0,14 A / 0,60 A |
Masse : 210 g | Couple : 24,5 mN/m |
Axe diamètre : 5 mm avec méplat ; longueur utile de l'axe : 18 mm. | Dimensions Lg / diamètre : 58,2 mm / 37,2 mm (la longueur est sans compter l'axe) |
La durée de vie n'est pas spécifiée pour ce moteur (elle est probablement de l'ordre de 3000 h).
Les balais ne sont pas interchangeables.
3- Mise en place du moteur dans le contexte du TEAC X-1000R
Pour réaliser l'adaptation mécanique de ce moteur à la fonction de moteur de cabestan sur un magnétophone TEAC X-1000R, il est nécessaire de voir les points ci-après :
nouvelle poulie d'entrainement (diamètre d'axe 5 mm) ;
nouvelle embase de fixation : réalisée dans ce premier projet au moyen d'une plaque en époxy permettant la fixation du moteur et du capteur ;
nouveau système anti vibrations (silent bloc : diamètre : 15mm ; longueur : 15mm ; axe : M4).
(c'est le diamètre maximum possible, le silent-bloc a été trouvé dans les accessoires de modélisme).
Attention : il existe plusieurs duretés de silent-bloc : préférez ceux prévus pour le modélisme à ceux prévus pour le domaine moto/quad.
A toute fin utile je redonne le plan de la dernière poulie. Elle a été rallongée car les nouveaux silent-blocs sont plus longs et il était judicieux de faire coïncider la roue optique avec l'embase pour la maintenir en place (voir la photo ci-après).

4- La mesure de la vitesse : disque optique
Après avoir réalisé un capteur de vitesse optique utilisant un engrenage (voir le post précédent), j'ai cherché une solution utilisant un disque optique comme ceux employés sur les capteurs incrémentaux.
La difficulté est toujours de réaliser une pièce avec une précision suffisante pour ne pas entraîner des fluctuations de vitesse.
Plusieurs tentatives ont été réalisées pour ce disque incrémental, j'en cite deux ici :
-- Disque optique réalisé en impression 3D professionnelle en résine noire phrozen PC/GF like.
Cette solution a produit un disque polymère ayant les caractéristiques suivantes :
encoches : 40 ;
diamètre : 50 mm ;
épaisseur 3 mm ;
avec fixation par vis.
Une pièce qui m'a couté 45 euros sur le site "usineur.fr"

L'ensemble avait toutes les chances de devenir une solution intéressante, mais, à la pratique, il y a des variations de la taille des trous qui produisent des impulsions ayant des durées différentes. J'ai noté des variations de 50 µs entre une encoche et la suivante.
Le système de régulation est en permanence sollicité pour ajuster la vitesse : la conséquence, est l'apparition d'un phénomène de scintillement.
Aussi séduisante soit-elle, cette solution ne peut pas être envisagée de façon définitive.
-- Disque optique réalisé par découpe laser sur une plaque de bois. Cette technique est généralement utilisée pour le prototypage rapide en mécanique.
 |  |
Caractéristiques du disque :
nombre d'encoches = 30
diamètre extérieur = 50 mm
diamètre axe = 5 mm
épaisseur plaque = 3 mm
Les impulsions obtenues sont fluctuantes, mais avec un écart plus faible qu'avec le disque précédent.
Le laser produit-il une plus grande précision que l'impression 3D ? Je ne sais pas répondre à cette question.
En l'absence de meilleure solution (pour le moment) c'est cette solution que j'ai mis en oeuvre.
Le diamètre d'axe du disque optique, légèrement plus petit que celui du moteur permet un ajustement serré qui dispense d'une fixation supplémentaire. En accolant le disque à la poulie, on s'assure de la perpendicularité du disque.
En fonctionnement à 19 cm/s :
le moteur tourne à n = 2048 tr/min
le disque effectue n' = 34,13 tr/s ;
la fréquence théorique du signal de sortie est donc f = 34,13 x 30 = 1024 Hz.
Remarque. Lors de la première série d'essais, j'ai été confronté à une légère augmentation des vibrations.
J'ai pu remédier à cette situation en éliminant toutes les parties du support susceptibles de vibrer. Voici l'évolution de l'embase :
|  |
L'idéal est, bien sûr, une embase triangulaire métallique.
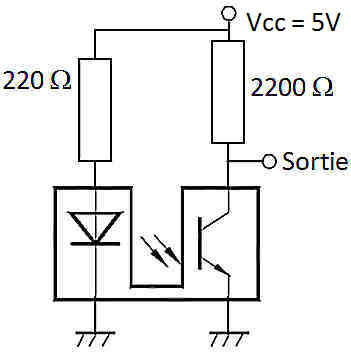
5- Capteur fourche type "interrupteur optique".
Solution 1.
J'ai testé la carte encodeur MH sensor, mais sans succès : la réaction du capteur est trop lente et la lecture à 19 cm/s ne se fait plus.

Solution 2.
J'ai donc fabriqué une carte spécifique utilisant un capteur LITEON LTH301. Les caractéristiques de ce capteur sont les suivantes :
temps de montée (rise time) : 3 à 15 µs max
temps de descente (fall time) : 4 à 20 µs max
A 9,5 cm/s, la période d'une impulsion est de l'ordre de T = 0,000977 s = 977 µs ; les temps de montée et de descente max sont donc faibles devant la plus petite période.
Le schéma de câblage de l'interrupteur optique Lite-On LHT301 que j'ai adopté, est le suivant :
 |  |
6- Les modifications de la carte.
La sortie peut attaquer directement la carte TEAC 51678860 ou la carte TEAC 51675661
Sur la carte de régulation TEAC 516...
- le condensateur C9 de 220 nF est remplacé par un 2,2 nF.
- la résistance R7 de 110 kohm (vitesse 9,5 cm/s) est inchangée
- la résistance R8 de 56 kohm (vitesse 19 cm/s) est inchangée
Sur le châssis du TEAC j'ai rajouté un régulateur 24V pour alimenter la carte régulation et le moteur. Cette opération avait pour but de limiter la puissance dissipée par le transistor Q4 qui chauffait excessivement.
Dans la pratique, je ne suis pas sûr que ce régulateur était indispensable.


Modification sur la carte "power - servo PCB".
Le régulateur a été vissé sur le châssis aluminium qui lui sert de refroidisseur.
7- Premiers essais et perfectionnement.
 |  Le support de circuit intégré visible sur la carte régulation, a été mis pour anticiper des éventuelles mis au point. En réalité, il n'est pas utile. |
Les difficultés rencontrées ont été nombreuses :
Difficulté du positionnement de la poulie par rapport à la courroie : en effet, il est difficile de trouver la position exacte de la poulie qui permet à la courroie d'être centrée par rapport aux surépaisseurs des cabestans. Ce positionnement a une conséquence directe sur la vitesse de lecture en mode direct / reverse ;
Longueur totale de la poulie pour un ajustement à la fois avec la courroie, le disque optique (avec son capteur) ;
Lutte contre les vibrations parasites sur les parties débordantes du support en époxy (qui, à terme, pourra être remplacé par de l'aluminium) ;
Problème de démarrage du moteur à la mise en route du magnétophone ou la mise en tension de la bande
En ce qui concerne ce dernier point, j'ai été forcé de constater que certaines fois le moteur ne démarrait pas (ou plus) au moment de la mise en tension de la bande, ou à la mise sous tension du magnétophone.
La seule explication rationnelle que j'ai trouvée est que le moteur plus puissant que son prédécesseur a besoin d'une impulsion de démarrage plus forte.
Le réseau série R16C8 de la carte régulation est insuffisant pour fournir le pic d'énergie nécessaire au démarrage.
J'ai fini par opter pour l'installation d'un relais qui donne une impulsion pour l'entrée en rotation du moteur.
Il est commandé chaque que le moteur vient à s’arrêter.
Ce relais vient court-circuiter le condensateur C8 de la carte de régulation. Ceci a pour effet de faire entrer en conduction les transistors Q3 et Q4. Il est commandé chaque fois que le moteur vient à redémarrer.
Le relais est un OMRON G5V-1 (24V). Sa bobine fait R=3600 ohm environ. Le condensateur C=100µF assure une impulsion de 0,4 s environ lors de la mise en marche du moteur (mise en tension de la bande).
 |  |
8- Essais, réglages et mesures.
8.1- Ajustement de la vitesse
J'ai ajusté les vitesses de défilement au moyen des bandes étalons :
- au standard Teac NAB 9,5 cm/s = 3,74 ips 185 nW/m (fréquence 3000 Hz)
- au standard Studer/Revox NAB 19 cm/s = 7,5 ips 257 nW/m (fréquence 3000 Hz).
Mode | à vide (9,5) | à vide (19) | forward (9.5) | forward (19) |
Tension moyenne moteur (V) | 6,86 | 12,51 | 7,11 | 13,05 |
Courant moyen moteur (mA) | 133 | 156 | 184 | 214 |
Fréquence capteur (Hz) | xxx | xxx | 517 | 1049 |
8.2- Mesure du niveau sonore
La mesure du niveau de bruit a été faite avec un sonomètre Chauvin Arnoult.
| Niveau silence | A vide | Vitesse 9,5 cm/s | Vitesse 19 cm/s |
Bobine 18 cm | 32.6 dB | 38.2 | 38.6 dB | 39.2 dB |

Le niveau sonore mesuré est tout à fait comparable au niveau de l'ancien moteur. La mesure ayant été faite capot ouvert avec un sonomètre dirigé vers le moteur, Dans les conditions normales, on sera probablement en dessous.
9- Vidéos associées aux différents posts.
https://youtu.be/WhJcmHXq68A Moteur DME45BT9 (video #1)
https://youtu.be/N5epqJ4DoBk Moteur Intechno (video #2)
https://youtu.be/d9wRi56dAs8 Moteur Nidec DMN37KB (video #3)
10- Téléchargement / download section.
Post M11- Téléchargement : version du 23 février 2026



Commentaires